|
|
|
|
|
哈尔滨工业大大学张泽旭教授团队——基于归一化有限旋转角与快速梯度初始化的月球动力下降段六自由度轨迹凸规划方法 | MDPI Aerospace |
|
|
论文标题:A Convex Optimization Framework for 6-DOF Lunar Powered Descent with a Normalized Finite Rotation Parameterization
论文链接:https://www.mdpi.com/2226-4310/13/4/300
期刊名:Aerospace
期刊主页:https://www.mdpi.com/journal/aerospace
当前,月球探测活动重心逐渐向月球南极、月背等复杂区域拓展。探测器动力下降过程中,需兼顾燃料最优、位姿、传感器指向等多重约束,其强耦合的动力学特性与短时着陆窗口对轨迹规划的实时性与求解稳定性提出了严峻挑战。来自哈尔滨工业大学的张泽旭教授团队的乔衍迪博士及其团队在Aerospace期刊发表了文章,提出了一种改进的序列凸规划方法,用于求解六自由度月球动力下降段的燃料最优轨迹规划问题。该方法为未来探测器自主着陆任务中快速轨迹生成提供了新的求解思路与技术参考。
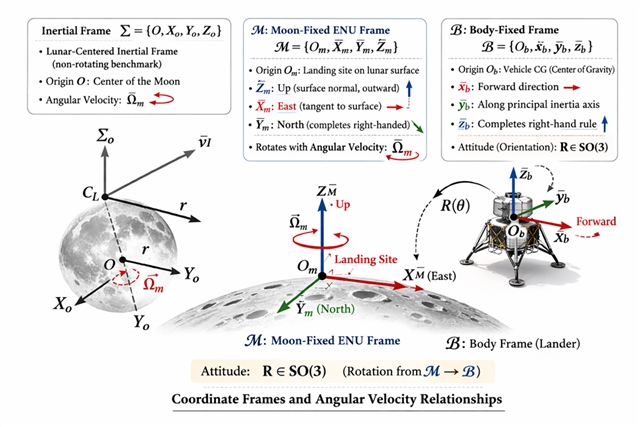
坐标系定义与探测器模型
研究过程与结果
本文提出一种基于改进梯度的序列凸规划方法,用于月球探测器动力下降阶段的六自由度燃料最优轨迹规划。针对月球南极、月背等复杂区域着陆任务中强耦合、多约束、高实时性的轨迹规划要求,该方法从动力学建模与初始解构造两方面实现关键优化。首先,该方法以归一化有限转角(FRA)列式描述转动动力学,替代传统姿态参数化方式,以最小参数实现SO(3)流形上的旋转描述,在优化迭代中保持姿态运动的几何一致性与计算高效性。在离散化求解前,采用快速迭代梯度策略生成初始参考轨迹,并在迭代中计算终端值投影类梯度,显著提升初始解质量与收敛稳定性。为全面验证方法有效性,设计全段动力下降与近地面 500 米高精度着陆两组典型仿真工况。对比结果表明:相较于修正罗德里格斯参数(MRP)方法,所提方法可大幅减少姿态机动次数、显著平滑姿态曲线并拓宽可行姿态域;相较于常规线性初始值猜测方式,该方法能够有效降低迭代次数、缩短求解耗时并提升燃料最优性。所提方法在六自由度强耦合约束下兼具高精度、高实时性与高燃料经济性,可为月球复杂区域自主软着陆任务的在线轨迹生成与安全制导控制提供可靠技术支撑。
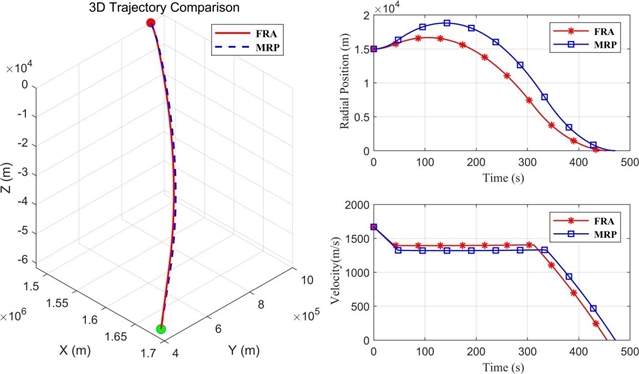
动力下降全段轨迹与速度曲线对比
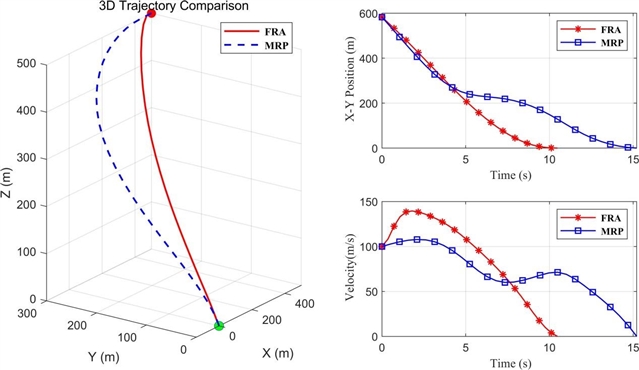
500米以下三维轨迹与速度曲线对比
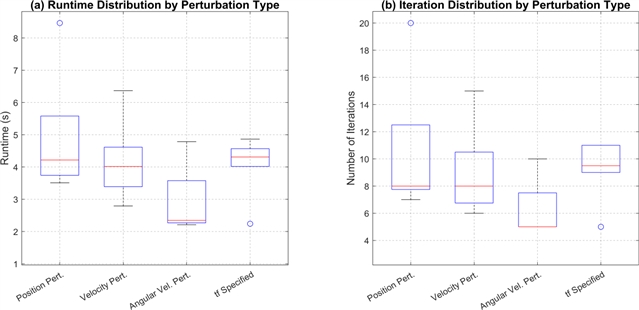
(a) (b)
基于快速迭代梯度(FIG)初值策略的不同扰动类型运行时间与迭代次数分布对比
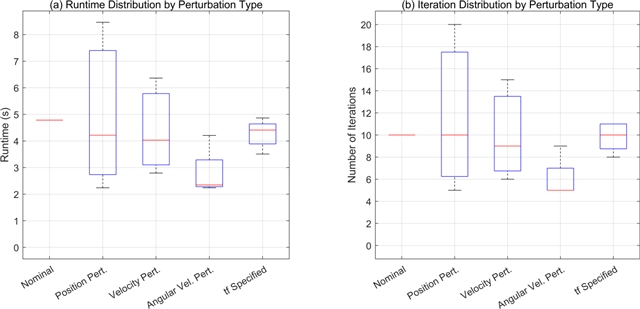
(c) (d)
基于一阶保持(FOH)初值策略的不同扰动类型运行时间与迭代次数分布对比
研究总结
本文提出一种基于改进梯度的序列凸规划方法,用于月球着陆器动力下降阶段的六自由度燃料最优轨迹规划,该方法采用归一化有限转角列式描述转动动力学。在离散化处理前,通过快速迭代梯度策略预估初始参考轨迹,并在迭代过程中求解投影类梯度。两组数值算例结果表明:相较于修正罗德里格斯参数(MRP)方法,所提方案可大幅减少姿态机动次数、平滑姿态变化曲线,并拓宽可行姿态轨迹的求解范围;同时,相比于线性初值猜测方式,该改进方法能够有效降低迭代次数、缩短运算耗时、减少燃料消耗。对于未来月球探测任务中的轨迹规划方法研究与机载应用提供了一种有效的计算框架。
Aerospace期刊介绍
主编:Konstantinos Kontis, University of Glasgow, Scotland, UK
Aerospace期刊致力于发表航空航天科学、工程和技术相关的创新研究,涵盖飞行器设计、推进系统、飞行控制、先进材料、空间科学、航空电子、无人机系统(UAS)、城市空中交通(UAM)、可持续航空、航空安全以及前沿技术等。鼓励跨学科研究,推动航空航天科技发展,欢迎实验、仿真与理论研究的原创成果及综述。
2025 Impact Factor:2.5
2025 CiteScore:4.8
Time to First Decision:22.9 Days
Acceptance to Publication:2.4 Days
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。