近日,中国科学院宁波材料技术与工程研究所精密驱动与智能机器人技术团队联合香港理工大学杨辰光团队,提出了一种鲁棒特征选择方法,可提升人机协作中的交互刚度估计能力。相关研究成果日前发表于《IEEE工业电子学汇刊》。
随着具身智能和人形机器人走向真实作业场景,机器人不仅需要学习人的运动轨迹,还需要学习动作背后的接触技能,如柔顺性、力适应和刚度调节。在打磨、装配、抛光、擦拭等接触密集型任务中,交互刚度决定了机器人应以何种“软硬程度”与环境发生作用,是机器人从人类示教中学习操作技能的重要信息。
然而,在实际工业场景中,准确估计交互刚度仍面临挑战。传统方法通常依赖运动捕捉、表面肌电信号等多模态传感系统,而表面肌电信号容易受到肌肉串扰、运动伪迹和未知噪声影响,导致有效特征难以稳定提取。
针对这一问题,作者团队提出了极值理论(EVT)驱动的无噪声最大相关最小冗余方法,即NF-MRMR。该方法利用EVT估计噪声截尾阈值,无需预先设定置信水平;同时构建无噪声相似性度量,用于评估含噪特征之间的冗余关系。通过最大化无噪声相关性并最小化无噪声冗余性,NF-MRMR能够从受未知噪声影响的高维数据中筛选出更紧凑、更具信息量的特征子集。
研究团队在来自制造、医药、图像识别等领域的15个基准数据集上验证了该方法,并在人机协作擦拭任务中验证了该方法的应用价值。
实验中,NF-MRMR仅利用筛选出的10个表面肌电特征,即可重构连续交互刚度;与三种基准方法相比,平均绝对误差降低约37.73%。基于估计得到的交互刚度,机器人实现了对不同压力痕迹的自主擦拭。
该研究为从含噪生理信号中提取可靠的人机交互线索提供了数据驱动工具,有望支撑刚度感知机器人技能学习。对于人形机器人及其他具身系统,该方法可为抛光、装配、表面处理和人类示教技能迁移等接触密集型任务提供参考。
相关论文信息:https://doi.org/10.1109/TIE.2026.3695189
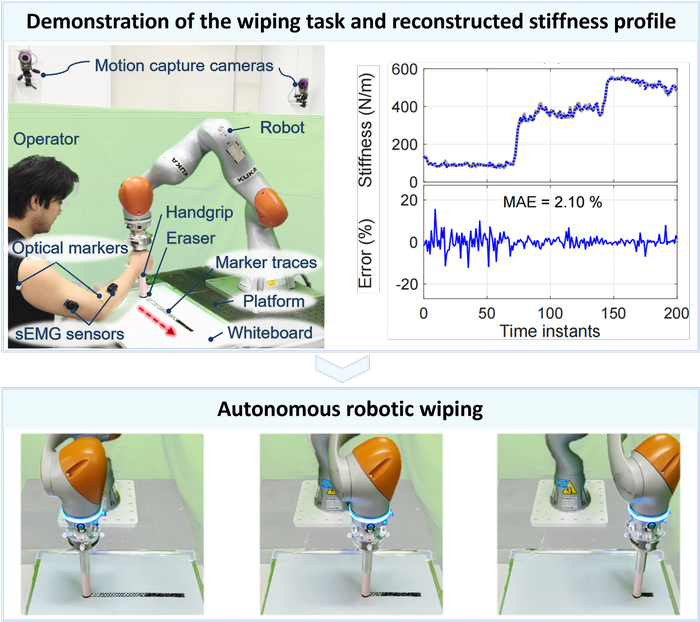 鲁棒特征选择方法在人机交互刚度估计中的应用及机器人自主擦拭效果。宁波材料所供图
鲁棒特征选择方法在人机交互刚度估计中的应用及机器人自主擦拭效果。宁波材料所供图
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。